연구소소개
-
16
KIST, ‘비대면 배송 방역로봇’ 한림대 성심병원에서 실증
- ‘딜리버디-H’ 한림대학교 성심병원에서 총 5일간 환자를 위한 비대면 배송 업무 수행 - 의료진 업무량과 감염 부담 낮춰 의료 서비스 질 개선 기대 한국과학기술연구원(KIST, 원장 오상록)은 4월 15일부터 19일까지 5일간 한림대학교 성심병원에서 지능로봇연구단 유범재 박사팀이 개발한 비대면 배송 방역로봇 ‘Deli-Buddy(딜리버디)’를 성공적으로 실증했다고 밝혔다. 딜리버디는 라스트 마일 딜리버리(Last Mile Delivery) 로봇으로, 격리된 환자들이 있는 곳까지 물품들을 안전하게 배송한다. 딜리버디는 코로나19와 같은 팬데믹 상황에서 격리된 환자들에게 음식과 생활용품을 전달할 때, 배송 인력의 감염 노출 위험을 줄이고 방호복 착용 및 물품 배송에 따른 업무 피로도를 감소시키기 위해 개발됐다. 딜리버디에는 엘리베이터 연동 관제기술과 마커리스 자율주행 기술을 적용해 현장에 별도로 인프라를 구축하거나 사람이 개입하지 않아도 원활한 주행이 가능하다. 또한 한 번에 다양한 모양과 크기의 물품을 적재할 수 있으며, 언로딩 기술을 탑재해 물품을 안전하게 배송 장소에 내려놓을 수 있다. 특히 이번 실증에 활용된 ‘딜리버디-H’는 생수와 같은 무거운 물품을 배송하기 위한 로봇으로 최대 12kg 무게의 물건을 3개까지, 총 36kg 적재할 수 있다. 또한 3시간 충전으로 약 8시간 작동할 수 있어 병원시설은 물론 공동주택 등에서도 높은 활용도가 기대된다. 실증은 팬데믹 이후에도 로봇이 환자와 의료진에게 도움을 줄 수 있다는 판단하에 7종 73대의 로봇을 3만 건 이상 활용한 경험을 보유한 한림대학교 성심병원에서 진행됐다. 한림대학교 성심병원 커맨드센터의 이미연 센터장(방사선종양학과 교수)는 “면회가 제한된 상황이나, 보호자 없이 혼자 입원하는 환자의 경우에는 필요한 물품을 의료진이 전달하거나, 환자가 직접 받으러 가는 불편이 있었다”라면서, “고령화, 1인 가구 증가 상황에서 딜리버디와 같은 로봇이 평상시에는 병원 현장에 도입되고, 새로운 팬데믹 발생 시에도 활용된다면 일거양득의 효과를 기대할 수 있을 것”이라고 말했다. KIST 유범재 박사는 “이번 실증을 통해 병원 등 현장에서 딜리버디를 사용할 때 현장의 요구사항, 로봇의 동작 성능과 개선점 등을 파악할 수 있었다”라면서 향후 실용화와 표준화를 준비할 계획이라고 밝혔다. 이번 연구성과는 과학기술정보통신부(장관 이종호)의 혁신도전프로젝트 시범사업(’20.7-’24.6)의 하나로 KIST, ㈜코가로보틱스, 광운대의 공동연구를 통해 수행됐다. [그림 1] (좌) 딜리버디, (우) 딜리버디-H [그림 2] 환자들을 대상으로 비대면 배송을 수행 중인 딜리버디-H
- 15
- 작성자지능로봇연구단
- 작성일2024.04.25
- 조회수1231
-
14
로봇을 입으니 북한산 등반도 가뿐하게, KIST ‘문워크’
- 고령자가 로봇을 착용하고 북한산 등반하는 웨어러블 로봇 챌린지 성공 - 웨어러블 로봇 이제 병원을 나와 우리의 일상 속으로 나이가 들면서 팔과 다리에 근력이 점차 약해짐에 따라 등산, 여행 등의 여가 활동이 어려울 뿐만 아니라 거동을 위해서는 지팡이, 휠체어와 같은 보조기구의 도움을 받아야 하는 경우도 많다. 하지만, 이러한 보조기구는 근력을 향상시키지는 못하기 때문에 로봇의 도움을 받아 부족한 근력을 보완할 수 있는 웨어러블 로봇이 고령자의 건강과 삶의 질 향상을 위한 혁신 기술로 주목받고 있다. 한국과학기술연구원(KIST, 원장 윤석진) 지능로봇연구단 이종원 박사팀은 웨어러블 로봇 MOONWALK-Omni를 착용한 고령자가 북한산 영봉 정상(해발 604미터)에 오르는 웨어러블 로봇 챌린지에 성공했다고 밝혔다. 이번 챌린지는 배터리 교체, 개발자의 개입 없이 로봇의 근력 보조를 받아 등반에 성공한 것으로 실외 복합환경에서 웨어러블 로봇의 상용화 가능성을 높였다. 기존에도 다양한 형태의 웨어러블 로봇이 개발됐지만, 무겁고 큰 부피로 인해 주로 단순한 실내 환경을 가진 병원에서 환자의 재활 과정에 제한적으로 활용되는 수준이었다. 하지만 MOONWALK-Omni는 초경량 웨어러블 근력 보조 로봇으로 사용자의 움직임을 예측하고 부족한 다리 근력을 지원해 고령자의 재활 및 일상 보조를 돕는다. 2kg 대의 장치로 고령자도 타인의 도움 없이 10초 이내에 쉽게 착용할 수 있으며, 골반 양측에 장착된 네 개의 초경량-고출력 구동기가 보행 시 균형을 맞출 수 있도록 보조하고 착용자의 다리근력을 최대 30%까지 강화해 추진력을 높일 수 있다. 로봇에 탑재된 인공지능(AI)은 착용자의 보행상태를 실시간으로 분석해 경사가 완만한 흙길, 험한 바윗길, 가파른 나무계단과 불규칙한 돌계단 등 다양한 보행환경에서도 안전하고 효과적으로 근력을 보조한다. 연구팀은 북한산 웨어러블 로봇 챌린지를 통해 병원보다 복잡한 일상 환경에서 웨어러블 로봇을 이용한 근력 보조 성능과 신뢰성을 검증하는 데 성공했다. 이번 챌린지에 수행한 고령 참여자는 “젊었을 때부터 즐기던 등산을 포기해야 하는 것으로 생각하고 있었는데 웨어러블 로봇을 착용하고 편안하게 산을 오르니 10년에서 20년은 젊어진 느낌이다”라고 웨어러블 로봇을 착용하고 산을 오른 소감을 말했다. KIST 이종원 박사는 "이번 챌린지를 통해 착용자의 및 보행환경의 다양성에도 안전하고 효과적인 근력 보조가 가능하다는 실험 데이터를 확보했다”면서 “초경량-고출력 웨어러블 로봇 구동 기술과 개인-환경 맞춤형 인공지능 근력 보조 기술의 융합을 통해 노화로 인해 근력이 부족해지는 고령자의 일상 보조, 재활, 운동 분야에서 폭넓게 활용될 것으로 기대된다”라고 말했다. 연구팀은 MOONWALK-Omni의 후속 연구로 다리 근력 강화 외에 고관절-무릎 등 하지의 복합관절을 동시에 보조하는 ‘MOONWALK-Support’도 개발 중이다. 또한, 웨어러블 로봇의 모터, 감속기, 컴퓨팅 회로 등 핵심기술과 부품을 국내기업에 기술이전하는 등 다양한 분야에서 성과를 거두고 있다. □ 개요 ㅇ 대상자 : 65세 고령자 ㅇ 챌린지 코스 : 북한산 육모정공원 – 영봉(고동 604m, 왕복 3시간) ㅇ 주요내용 - 세계 최초 실외복합환경(북한산) 웨어러블 로봇 챌린지 달성 - 고령자가 KIST 웨어러블 로봇 문워크를 착용하고 북한산 등정 완료 - 장시간, 다양한 복합보행환경에서 배터리 교체, 개발자의 로봇 조정 개입 없이 로봇의 근력 보조를 받으며 성공적 등정 완료 ㅇ 영상 링크 : https://youtu.be/K9j5tbMQyQ8 [그림 1] KIST 이종원 박사팀이 개발한 웨어러블 로봇 MOONWALK 북한산 웨어러블 챌린지 중 고령자가 로봇을 입고 복잡한 돌계단 환경에서 걸어 올라가는 모습 [그림 2] KIST 연구진들의 북한산 웨어러블 챌린지 65세 고령자가 웨어러블 로봇을 입고 근력을 보조받아 북한산 영봉 정상 등정에 성공 [그림 3] 문워크 로봇 랜더링 이미지 웨어러블 로봇 MOONWALK-Omni의 이미지
- 13
- 작성자지능로봇연구단 이종원 박사
- 작성일2024.01.11
- 조회수2130
-
12
130g 소프트 로봇 그리퍼가 100kg을 들어 올린다고?
- 직조 구조를 모방한 소프트 로봇 그리퍼 개발 - 소프트 로봇 그리퍼의 우수한 성능·경제성·공정 효율성 모두 확보 천, 종이, 실리콘과 같은 부드럽고 유연한 소재를 활용해 만든 소프트 로봇 그리퍼(Gripper)는 로봇의 손처럼 동작해 물체를 안전하게 잡거나 놓는 등의 기능을 수행하는 필수 장치이다. 기존의 강성 재료 그리퍼와 달리 유연성과 안전성이 높아 계란과 같이 깨지기 쉬운 물체를 다루는 가사용 로봇이나 다양한 형태의 물건을 운반해야 하는 물류용 로봇을 위해 연구되고 있다. 하지만 적재 용량이 낮아 무거운 물체를 들어올리기가 어렵고, 파지(grasping) 안정성이 떨어져 약한 외부 충격에도 물체를 놓치기 쉬웠다. 한국과학기술연구원(KIST, 원장 윤석진) 지능로봇연구단 송가혜 박사 연구팀은 한국과학기술원(KAIST, 총장 이광형) 항공우주공학과 이대영 교수팀과 함께 130g의 소재로 100kg 이상의 물체를 파지할 수 있는 직조 구조의 소프트 그리퍼를 공동 개발했다고 밝혔다. 연구팀은 소프트 로봇 그리퍼의 적재 용량을 높이기 위해 새로운 소재를 개발하거나 구조를 보강하는 기존 방식과 달리 직물에서 착안한 새로운 구조를 적용했다. 연구팀이 주목한 직조 기술은 낱개의 실을 단단히 얽어 견고한 직물을 만드는 기술로, 무거운 물건을 안정적으로 지지할 수 있어 수 세기에 걸쳐 의류, 가방 및 산업용 직물 등에 활용되고 있다. 연구팀은 얇은 PET플라스틱 띠들이 직조 구조로 얽히고 풀어질 수 있도록 설계해 그리퍼를 제작했다. 이렇게 제작된 직조 구조의 그리퍼는 130g의 무게로 100kg의 물체를 파지할 수 있다. 같은 무게의 기존 그리퍼는 최대 20kg 이내를 들어 올릴 수 있었고, 동일한 무게를 들어 올릴 수 있었던 그리퍼는 무게가 100kg에 달하는 점을 고려했을 때 자체 무게 대비 적재 용량을 월등히 증가시키는 데 성공했다. 또한, 연구팀이 개발한 소프트 로봇 그리퍼는 재료 단가가 수천 원에 불과한 플라스틱을 사용하며, 다양한 형상과 무게의 물체도 파지가 가능한 범용 그리퍼로 활용할 수 있어 높은 가격 경쟁력을 가지고 있다. 뿐만 아니라 플라스틱 띠를 체결하는 방식만으로 소프트 로봇 그리퍼의 제작이 완료되기 때문에 제작공정이 10분 이내로 간단하고 교체 및 유지보수도 쉬워 공정 효율성이 뛰어나다. 한편, 연구팀이 주재료로 활용한 PET 외에도 탄성을 보유한 고무 및 화합물 등의 다양한 재료로도 제작할 수 있어 강한 파지 성능이 필요한 산업 및 물류 현장이나 극한 환경을 견뎌야 하는 다양한 환경에 적합한 그리퍼를 맞춤 제작, 활용할 수 있다. KIST 송가혜 박사는 “이번에 개발된 직조 구조의 그리퍼는 소프트 로봇의 강점이 있으면서도 강성 그리퍼 수준으로 무거운 물체를 움켜쥘 수 있다. 또한, 동전부터 자동차까지 다양한 크기로 제작할 수 있으며, 얇은 카드부터 꽃에 이르기까지 여러 가지의 형태와 무게의 물체를 파지할 수 있어 소프트 그리퍼를 필요로 하는 산업, 물류, 가사 등의 분야에서 활용가능할 것으로 기대된다"라고 밝혔다. 본 연구는 과학기술정보통신부 (장관 이종호) 지원으로 KIST 주요사업과 한국연구재단 기초연구사업(2022R1C1C1003718), 해외고급과학자 초빙사업(NRF-2020H1D3A2A03099291), 기초연구실지원사업(NRF-2020R1A6A3A01099512)을 통해 수행됐다. 연구 결과는 국제학술지 ‘Nature Communications’ (IF:16.6, JCR 분야 상위 8.2%)에 8월 2일 게재됐으며 분야별 최고의 50개 논문을 소개하는 Editors’ Highlights에 선정됐다. [그림 1] 직조 구조의 그리퍼 구상도 [그림 2] 그리퍼의 동작 모습 및 성능 [그림 3] 직조 구조의 그리퍼와 소프트 그리퍼, 강체 그리퍼의 그리퍼 무게 대비 페이로드(로봇이 들어올릴 수 있는 최대 무게) 비교 ○ 논문명: Grasping through dynamic weaving with entangled closed loops ○ 학술지: Nature Communications ○ 게재일: 2023. 8. 2. ○ DOI: https://doi.org/10.1038/s41467-023-40358-y ○ 논문저자 - 강경지 학생연구원(제1저자/KIST 지능로봇연구단) - 송가혜 선임연구원(교신저자/KIST 지능로봇연구단) - 이대영 교수(교신저자/ KAIST 항공우주공학과)
- 11
- 작성자지능로봇연구단 송가혜 박사팀
- 작성일2023.09.13
- 조회수2864
-
10
KIST, 소셜로봇의 새로운 패러다임을 제시하다
- KIST 콜래봇(CollaBot), ICSR 2022 하드웨어, 디자인, 인터페이스 부문 최고상 수상 - 상황맥락을 파악해 복합 서비스를 제공하는 로보틱 도서관 시스템 한국과학기술연구원(KIST, 원장 윤석진)은 곽소나 박사 연구팀이 2022년 12월 13일부터 16일까지 이탈리아 피렌체 상공회의소에서 개최된 국제 소셜로봇 학술대회 (International Conference on Social Robotics 2022, 이하 ICSR 2022)의 일환으로 개최된 로봇디자인 대회에 콜래봇(CollaBot)을 출품해 유니버시티 칼리지 런던 (University College London)의 버블 월드(Bubble Worlds)와 최종 경합 끝에, <하드웨어, 디자인, 인터페이스> 부문 최고상의 영예를 안았다고 밝혔다. 기존 소셜로봇 관련 연구는 휴머노이드 로봇을 기반으로 한 연구가 주를 이루었다. 다시 말해 휴머노이드 로봇이 상황을 파악하고, 다양한 도구를 사용해 상황에 적합한 복합 서비스를 제공하는 것을 목표로 했다. 그런데, 인간을 닮은 휴머노이드 로봇은 소비자가 인간 또는 그 이상의 능력을 기대하게 했지만, 실제 기능은 그에 미치지 못해 시장진입에 어려움을 겪고 있었다. 또한 로보틱 제품은 하나의 기능에 특화되어 개발될 수밖에 없으므로 소비자의 상황맥락에 맞는 다양한 복합 서비스를 제공하는데 있어서는 분명한 한계를 갖고 있었다. KIST 곽소나 박사 연구팀은 이와 같은 한계를 극복하기 위한 방안으로 다수의 로보틱 제품이 인식한 정보를 통합하여 상황 맥락을 파악하고 인식한 상황에 적합한 서비스를 제공하는 로보틱 도서관 시스템 콜래봇(CollaBot)을 개발했다. 책장, 책상, 의자, 조명 등으로 구성된 이 시스템은 다수의 로보틱 제품 간 협업을 기반으로 한 인간-로봇 상호작용을 제공한다. 세부적인 시스템 환경은 다음과 같다. 사용자의 휴대폰, 출입문, 로보틱 책장, 로보틱 의자가 서로 연결되어 휴대폰으로 검색하면 해당 도서가 위치한 책장이 돌출된다. 의자는 책장의 높이에 따라 사다리의 역할을 하기도 하고, 이동해야 하는 책이 많을 경우 카트의 역할을 하기도 한다. 다시 말해 각각의 구성요소가 가 본연의 기능뿐 아니라 상황 맥락에 따라 기능을 변환하여 사용자 맞춤형 서비스를 지원하게 되는 것이다. 콜래봇의 상호작용을 디자인한 KIST 강다현 박사는 “본 연구에서 제안하는 다수의 로보틱 제품 간 협업을 기반으로 한 로보틱 시스템은 기존 사물인터넷(Internet of Things)에 로봇 기술을 적용해 물리적 서비스까지 제공할 수 있게 되어 다양한 경로를 통한 상황 맥락 인식 및 서비스가 가능한 로봇 사물인터넷(Internet of Robotic Things) 기반 초연결 사회를 구현할 수 있을 것이다. 우리의 일상생활에 실질적인 도움을 주는 서비스 제공하는 이러한 시스템은 이제까지 와는 다른 개념의 새로운 로봇 시장을 개척할 수 있을 것으로 기대한다.”라고 밝혔다. 올해로 13회째를 맞은 ICSR의 로봇 디자인 대회는 대표적인 소셜로봇인, 소피아(Sophia), 나오(Nao), 페퍼(Pepper)의 개발에 참여하였던 아밋 쿠머 팬디(Amit Kumar Pandey)가 심사위원장을 맡고 있다. 본 연구는 KIST 주요사업과 KIST 기술융합지원센터 기술지원 프로그램으로 수행되었다. * (작품명) CollaBot: Collaborative Human-Robot Interaction Design for Robotic Library - (제1저자) 한국과학기술연구원 강다현 포닥 - (공동저자) 김민희 학생, 최주한 학생, 이원일 학생 - (교신저자) 한국과학기술연구원 곽소나 선임연구원 그림 1. 로보틱 서재, 콜래봇 그림 2. 상황 맥락에 따라 기능을 변형하는 의자 그림 3. 로보틱 도서관 시연 사례 - 사용자 키 정보를 기반으로 한 서비스 사례 그림 4. 로보틱 도서관 시연 사례 - 책의 개수를 기반으로 한 서비스 사례
- 9
- 작성자지능로봇연구단 곽소나 선임연구원
- 작성일2023.01.20
- 조회수8958
-
8
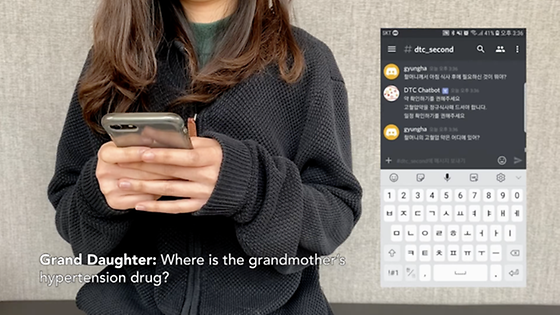
인공지능으로 다양한 치매 환자 쉽게 돌본다
- 치매 환자 돌봄 전문서적, 매뉴얼 등 한 곳에 모아 - 치매 돌봄 부담 경감 및 인공지능 기기 활용한 치매 돌봄에 활용 기대 고령화가 급속히 진행됨에 따라 치매 환자 돌봄이 사회적 문제로 주목받고 있다. 환자 급증으로 인한 사회적 비용을 절감하기 위한 기존 연구는 주로 치매 진단법이나 환자 개인의 독립적인 생활을 지원하는 컴퓨터·인터넷 기반 프로그램 개발에 집중되었다. 하지만, 치매는 그 증상이 환자 개인마다 다르게 나타나며, 주변 상황에 따라 급격히 변화하기도 한다. 이 때문에 돌봄 노동자 1인이 다수의 치매 환자를 관리해야 하는 상황에서 이들을 지원하여 부담을 경감시키기 위한 기술이 필요하다. 한국과학기술연구원(KIST, 원장 윤석진)은 치매DTC 융합연구단 임윤섭 선임연구원 연구팀이 다양한 치매 환자의 증상과 생활환경에 적합한 돌봄 방법을 알려주고, 다수의 돌봄 노동자들이 치매 환자의 증상 및 돌봄 방법을 편리하게 공유할 수 있는 인공지능 기반 치매 돌봄 지식서비스 플랫폼을 개발했다고 밝혔다. 개발된 치매 돌봄 지식서비스 플랫폼은 온톨로지 형태의 지식베이스, 추론시스템 및 그래픽 기반의 사용자 인터페이스로 구성되어 있다. 본 연구에서 개발된 온톨로지 지식베이스는 치매 환자 돌봄 방법, 생활환경, 의료지식, 치매 환자의 일상생활 능력 정보, 환자 혹은 주변인 정보 등으로 구성되어 있다. 연구팀은 지식베이스 개발을 위해 치매 환자 돌봄 관련 서적, 돌봄 시설 매뉴얼, 치매 증상과 인간의 생활환경 등에 대한 기존 온톨로지 모델을 참고하였다. 추론시스템은 사용자의 질의에 따라 온톨로지에 정의된 추론 규칙을 활용하여 치매 환자에 맞는 돌봄 방법 및 돌봄 지식의 추론을 수행한다. 또한 개발된 플랫폼을 개인용 컴퓨터나 휴대용 스마트 기기를 통해 쉽게 사용할 수 있도록 그래픽 기반의 사용자 인터페이스를 개발했다. 사용자가 플랫폼에 치매 환자에 대한 정보를 직접 입력하고 갱신함으로써 환자의 현 상태에 적합한 돌봄 정보를 손쉽게 얻을 수 있다. 연구진은 지식베이스의 개발단계 초기에서부터 실제 치매 돌봄 현장에서 근무하는 돌봄 노동자와의 인터뷰를 통해 취합된 돌봄 지식의 유효성 및 온톨로지 모델의 정확성을 검증하였다. 최종적으로는 10년 이상의 경력을 가진 성북노인종합복지관, 광주 한울요양원 소속 전문가들에게 개발된 서비스 플랫폼에 대한 사용성 테스트를 통해 실제 돌봄 현장에 적용 가능함을 확인하였다. KIST 임윤섭 박사는 개발된 치매 돌봄 지식서비스 플랫폼을 “로봇 및 챗봇과 같은 인공지능 기술 기반 돌봄 서비스에도 활용할 수 있다”라고 말하며, “가정 및 돌봄 노동자의 치매 돌봄 부담 경감에 효과적인 역할을 할 것으로 기대된다”라고 밝혔다. 본 연구의 결과는 산업통상자원부(장관 문승욱)의 산업기술혁신사업(로봇산업핵심기술개발사업-인공지능융합로봇시스템기술) 및 과학기술정보통신부(장관 임혜숙)의 미래선도형 융합연구단 사업으로 수행되었으며, 연구결과는 Health care science and service 분야 국제학술지 ‘Journal of Medical Internet Research’ (JCR 분야 상위 4.41%) 6월호에 게재되었다. * (논문명) A Care Knowledge Management System Based on a Ontological Model of Caring for People with Dementia: Knowledge Representation and Development - (제 1저자) 한국과학기술연구원 김경하 박사후연구원 (現 한국생산기술연구원) - (제 1저자) 한국과학기술연구원 전화우 학생연구원 - (교신저자) 한국과학기술연구원 임윤섭 선임연구원 그림 설명 [그림 1] 치매 돌봄 서비스 플랫폼 아키텍처 치매 돌봄 서비스 플랫폼은 User Interface(치매 환자 데이터의 입출력), Context Data Manager(클라우드로부터 수집된 데이터 및 치매 환자 자료를 관리하고 사용자의 요청을 처리), Context Reasoner(온톨로지 형태의 치매 돌봄과 관련된 지식 모델, 그리고 지식 모델을 기반으로 사용자 요청에 적합한 지식을 추론)로 구성되어 있다. * OWL: Web Ontology Language * PwD: persons with dementia * SWRL: Semantic Web Rule Language [그림 2] 치매 돌봄 지식서비스 플랫폼의 그래픽 유저 인터페이스 화면 (사용 동영상: https://www.youtube.com/watch?v=wej9RyvsytI&t=110s) 치매 돌봄 지식서비스 플랫폼을 이용한 챗봇 활용 예시 (사용 동영상: https://youtu.be/Bm3M3WOrGcg)
- 7
- 작성자치매DTC융합연구단/지능로봇연구단 임윤섭 박사팀
- 작성일2021.08.05
- 조회수22184
-
6
공존현실 기반 4D+ SNS 플랫폼 개발
- 현실과 가상세계가 통합된 환경에서 SNS 서비스 제공 기존 소셜네트워크서비스(SNS)를 뛰어넘어 사용자들이 현실과 가상을 넘나들며 소통할 수 있는 플랫폼이 개발되었다. (재)실감교류인체감응솔루션연구단(단장 유범재, 이하 ’인체감응 연구단‘)이 다수 사용자가 공간과 감각을 실시간으로 공유하고 소통할 수 있는 (가칭)4D+ SNS 플랫폼을 개발했다고 과학기술정보통신부(장관 최기영, 이하 ’과기정통부‘)는 밝혔다. 인체감응 연구단은 글로벌 프론티어 사업 지원을 통해 원격 인터랙션 SW 프레임워크, 핸드 모션캡처 디바이스, 아바타 모델링 기술 등을 개발해왔으며, 기존 성과들을 융합?연계하여 서비스 모델로 구현하게 된 것이다. 카카오톡, 페이스북 등 기존 SNS도 문자, 사진, 동영상 등을 공유할 수 있지만, 사용자들의 공간과 감각을 실시간 공유하는 것에 한계가 있고, 기존 가상현실(VR) 서비스도 혼자 체험하는 것이 대부분으로, 다수 사용자들이 동시에 체험하고, 소통하는 데에는 한계가 있었다. 이에 반해 인체감응 연구단이 개발한 4D+ SNS는, 다수 사용자들이 공존현실에서 공간과 감각정보를 실시간 공유하고 소통함으로써, 원격 회의, 가상 쇼핑, 미니 게임 등을 함께 할 수 있도록 다양한 협업 콘텐츠를 제공할 수 있다. 사용자는 자신을 대신하는 아바타로 표현되어 네트워크에 접속한 다른 장소에 있는 사용자들과 소통하고, 협업할 수 있다. 가상키보드를 사용하여 메시지를 보내거나, 3D 이모티콘을 보내 감정을 전달하고, 가상공간에 그림을 그리거나, 가상 물체를 조작하면서 토론하고, 함께 동영상을 감상할 수 있으며, 가위바위보, 블록쌓기 같은 가상게임을 함께 즐기거나, 다른 장소에 있는 사용자들의 아바타들을 자신이 있는 장소로 초대하여 함께 소통하고 협업할 수도 있다. 유범재 단장은 “이번 연구성과는 5G 네트워크 시대의 킬러앱(Killer App)으로 떠오르는 양방향 소통 서비스, 가상/혼합 현실 서비스를 포함하는 새로운 SNS 개념을 제시한 데 큰 의미가 있다”라며, “관련 기업들과의 협업을 바탕으로 사업화를 적극추진하여 4D 가상통신 서비스 신시장 창출에 기여할 계획이다”라고 밝혔다. 인체감응 연구단은 ㈜에스피테크놀로지, ㈜플레이스비 및 ㈜패러렐월드와 공동연구를 수행하여 플랫폼을 개발하고 두 곳 이상의 원격지를 연결하여 서비스를 자체검증한 후 상용화를 추진 중이다. <그림설명> [그림 1] 4D+ SNS 개념 : 집에 있는 친구(아바타)에게 3D 이모티콘을 보내고, 새로운 제품의 3D 모델을 함께 보면서 만져보고, 가구에 올려놓거나 혹은 아바타에게 착용해 보면서 상의하여 선택한 후, 결제 [그림 2] 사용자들이 자신의 아바타를 선택한 후 접속한 로비에서 다른 사용자들과 서로 인사하거나 그림을 그려 공유하는 화면 [그림 3] 현실 공간에서 HMD를 착용하고, 자신의 아바타를 움직이면서 4D+ SNS를 체험하고 있는 사용자들 [그림 4] 4명의 사용자들이 모여서 ‘해적 룰렛’ 게임을 함께 하는 화면 [그림 5] 사용자들이 커머스 기능을 사용할 수 있는 공간으로 이동하여, 다양한 가상 객체로 구현된 상품을 조작하고 상품 정보를 조회하여 구매 결정을 할 경우 이메일로 상품 구매 사이트를 안내해주는 서비스 [그림 6] 개발된 4D+ SNS를 다수의 사람들에게 체험하게 하고 사용성 평가를 진행하는 모습
- 5
- 작성자실감교류인체감응솔루션연구단 유범재 단장팀
- 작성일2019.10.15
- 조회수8086
-
4
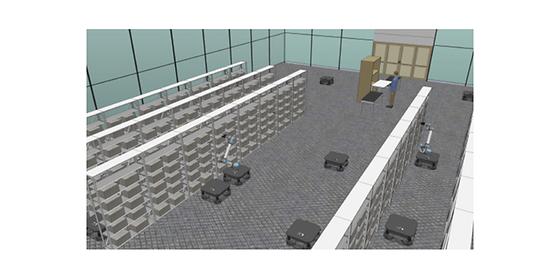
다수 로봇의 효율적 분업화 알고리즘 개발, 자율주행 로봇의 유연한 임무 할당 방식 제시
- 중앙 집중식, 분산식 시스템의 장점 합친 협업 알고리즘 개발 - 기존 알고리즘 대비 협업 효율성 2배 향상, 로봇 협업 효율성 극대화 한국과학기술연구원(KIST, 원장 이병권) 지능로봇연구단 남창주 박사는 다수의 로봇이 최소한의 데이터 교환을 통해 효율적으로 분업하여 많은 일을 신속하게 완수할 수 있도록 임무를 할당하는 알고리즘을 개발했다고 밝혔다. 글로벌 유통기업의 창고에서는 물류 로봇 수백 대가 쉼 없이 움직이며 주문받은 상품들을 택배 포장대로 운반한다. 수백, 수천 개의 상품을 가져오는 작업을 로봇들에게 적절하게 분배하는 일은 전체 시스템의 효율성에 큰 영향을 미친다. 창고 내 로봇뿐만 아니라 드론이나 자율주행 로봇을 통한 물류배송, 자율주행 택시의 배차, 재난지역에서의 조난자 수색작업, 광범위한 지역의 보안·감시 등의 응용 분야에서 다수의 로봇에게 효율적으로 임무를 할당하는 일은 필수적이다. 최근 중앙 시스템 없이 각 로봇이 스스로 판단하고 작업을 수행토록 하는 연구가 활발히 진행되고 있으나 현장에서 사용하기에는 구현과 최적화가 어렵다. 따라서 중앙에서 모든 연산을 처리하고 로봇에게 명령을 내리는 중앙 집중식 시스템이 선호되고 있다. 하지만 이 방식은 중앙 시스템이 환경에서 변화가 발생할 때마다 모든 로봇으로부터 정보를 수집하여 매번 새롭게 의사결정을 내려야 한다. 그 때문에 로봇이 넓은 지역에 흩어져 있거나 무선 통신이 원활하지 않을 때, 상황의 변화에 즉각적으로 대처하지 못하는 단점이 있다. KIST 남창주 박사는 구현과 관리가 쉬운 중앙 시스템 구조를 유지하면서도 변화에 신속히 대응하여 다수의 로봇에게 효율적으로 임무를 할당하는 알고리즘을 개발했다. 이 알고리즘은 로봇이 획득한 정보를 중앙 서버가 수집하는 과정을 최소화하거나 생략할 수 있도록 했다. 이를 통해, 로봇이 협업하기 위해 통신에 들이는 시간과 비용을 획기적으로 줄일 수 있었다. 줄어든 통신량에도 불구하고 협업의 효율성은 기존 대비 효율을 약 2배 이상 증가시킬 수 있었다. KIST 연구진이 개발한 알고리즘을 통해 로봇들은 변화하는 상황 속에서도 중앙 서버와 통신 없이, 또는 최소한의 데이터 교환을 통해 더욱 신속하게 다수의 작업을 끝마칠 수 있다. 이를 통해, 통신 네트워크의 확장·보강 없이도 동시에 운용할 수 있는 로봇의 수를 크게 늘릴 수 있을 것으로 기대된다. 남창주 박사는 창고 물류 자동화 솔루션을 개발하는 관련 연구를 했던 경험에 비추어 “미래에는 여러 로봇이 상호 작용하며 주어진 작업을 수행하게 될 것”이라고 예측했다. 또한 “이 연구의 이론적 성과는 향후 다양한 응용 분야에서 로봇 간 협업의 효율성을 극대화하여 더 큰 시너지를 만들어 낼 것으로 생각된다.”라고 밝혔다. 본 연구는 과학기술정보통신부(장관 최기영) 지원으로 KIST 주요사업과 미국 과학재단의 지원으로 수행되었으며, 연구결과는 로봇 분야 최고 권위 학술지인 IEEE Transactions on Robotics(IF : 6.48, JCR 분야 상위 : 5.77%) 최신호에 온라인 게재되었다. * (논문명) Robots in the huddle: Upfront computation to reduce global communication at run-time in multi-robot task allocation - (제 1저자, 교신저자) 한국과학기술연구원 남창주 선임연구원 <그림설명> <그림 1> 제안된 알고리즘이 적용되어 물류창고에서 다수의 로봇이 효율적인 협업을 통해 물류작업을 하고 있다.
- 3
- 작성자지능로봇연구단 남창주 박사팀
- 작성일2019.10.02
- 조회수8778
-
2
코딩없이 볼 트래핑하는 로봇 개발
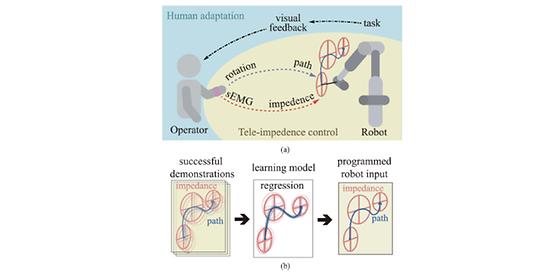
- 근육 표면 근전도 신호로 사람의 움직임을 따라하게 하여 로봇을 학습 - 축구 선수처럼, 떨어지는 공을 트래핑 하도록 로봇을 학습시키는데 성공 한국과학기술연구원(KIST, 원장 이병권) 지능로봇연구단 김기훈 박사팀은 표면 근전도 신호*를 이용하여 사람이 시연을 통해 “유연한 로봇”을 학습시키는 방법을 개발하여, 로봇이 마치 축구 선수처럼 떨어지는 공을 트래핑하도록 학습시키는데 성공했다. *표면 근전도 신호(surface electromyogram) : 근육이 수축할 때 발생하는 내부의 전기 신호를 피부 표면에서 측정한 생체 전기 신호 최근 등장한 유연한 로봇은 기존의 단단한 로봇과는 다르게 사람의 근육이나 관절처럼 유연한 탄력을 가져 로봇의 새로운 시대를 열었다. 이 유연한 로봇은 마치 사람처럼 달리고, 점프를 하여 장애물을 넘고, 스포츠를 함께 즐길 수 있을 것으로 기대되었다. 그러나 이런 동작이 가능해진 유연한 로봇에게 이런 기술을 가르쳐줄 수 있는 방법은 아직 개발된 바가 없었다. KIST 연구팀은 이런 유연한 로봇에게 사람의 생체 근육 신호를 이용하여 새로운 동작을 직접 가르칠 수 있는 기술을 최초로 개발했다. 사람이 운동을 할 때 발생하는 근육의 전기 신호인 표면 근전도 신호로부터 자세뿐만 아니라 유연성을 함께 측정할 수 있는 기술을 바탕으로, 사람이 운동을 직접 로봇에게 시연하여 가르칠 수 있게 된 것이다. KIST 김기훈 박사팀은 이를 이용해 로봇이 마치 축구 선수처럼 빠르게 떨어지는 공을 단단한 부분 위에 공이 크게 튀지 않도록 트래핑하는 기술을 학습시키는데 성공했다. 사람의 팔에 표면 근전도 센서를 부착하여 위아래로 빠르게 움직이는 로봇의 위치와 유연성 두 가지를 동시에 제어할 수 있게 하고, 빠르게 떨어지는 공을 보고 사람이 직접 로봇에게 시연하여 트래핑하는 방법을 학습시켰다. 학습된 로봇은 사람 없이도 떨어지는 공을 능숙하게 트래핑하는데 성공하였다. 이번 연구 성과는 유연한 로봇의 작업을 수학적으로 일일히 계획하고 프로그래밍하는 것이 아니라 사람이 직관적으로 직접 학습시킬 수 있어 주목받고 있다. 로봇과 사람의 상호작용을 발전시켜 로봇을 우리의 생활 속으로 한 발짝 더 가깝게 만들 수 있을 것으로 기대된다. KIST 김기훈 박사는 “이번 성과는 로봇에게 사람의 능숙한 기술을 학습시키는 방법으로 앞으로 로봇과 사람이 상호작용하는데 중요한 계기가 될 것” 이라고 밝혔다. 본 연구는 과학기술정보통신부(장관 유영민) 지원을 받은 한국연구재단 글로벌프론티어 사업으로 수행되었다. KIST와 POSTECH 정완균 교수팀의 공동연구로 진행된 이번 연구결과는 제어분야 국제 저널인 ‘IEEE Transactions on Industrial Informatics’ (IF: 5.430, JCR 분야 상위 1.06%) 최신호(VOL.15, 2월호)에 게재되었다. * (논문명) Programming by Demonstration Using the Teleimpedance Control Scheme: Verification by an sEMG-Controlled Ball-Trapping Robot - (제1 저자) 한국과학기술연구원 박성식 연구원(포항공과대학교 기계공학과 박사과정) - (교신저자) 한국과학기술연구원 김기훈 책임연구원 - (공저자) 포항공과대학교 정완균 교수 <그림설명> [그림 1] (a) 사람의 시연을 통한 로봇의 임피던스 프로그래밍 방법 모식도 (b) 성공적인 시연을 통해진 경로와 임피던스 정보를 학습하는 방법
- 1
- 작성자지능로봇연구단 김기훈 박사팀
- 작성일2019.03.19
- 조회수9661
-
0
척추 디스크 시술을 위한 국산 카테터 로봇 시스템 '닥터 허준(Dr. Hujoon)' 개발
- 직경 3mm급 전동 카테터와 로봇을 이용한 사체(카데바) 실험 세계 최초 성공 - 정교하고 안전한 수술 가능, 안과, 신경외과 등 미세 수술영역 활용 기대 KIST 전북분원 복합소재기술연구소가 19일(금) 스포츠·레저 산업부터 핸드폰, 자동차, 항공기에 이르기까지 일상 속 다양한 분야에서 활용되는 첨단 복합소재의 최신 연구 동향을 공유하고 발전방안을 모색하는 자리를 마련한다. 한국과학기술연구원(KIST, 원장 이병권)은 오는 10월 19일(금) 전북분원 복합소재기술연구소(전북분원, 분원장 홍재민) 대강당에서 복합소재 분야 세계적인 석학 3명을 초청하여 정부, 지자체 및 산·학·연 주요인사 200여 명이 참석한 가운데 ‘KIST Composite Conference International 2018’을 개최한다고 밝혔다. 특히, 이날 행사에는 세계적인 석학들의 강연이 진행된다. 세계의 복합소재 분야의 최신 연구사례를 주제로 美 조지아 공과대학의 쿠마(Satish Kumar) 교수, 獨 드레스덴 공과대학의 예거(Hubert Jaeger) 교수, 美 NASA의 박철 박사의 강연을 통해 연구동향을 공유한다. 또한 패널토의 시간을 통해 국내의 복합소재 산업 발전전략에 대해 토의하는 시간을 가진다. 이번 컨퍼런스는 3명의 석학이 한 자리에 모이는 만큼 국내외 관련 산업 및 학계의 많은 주목을 받고 있다. 미국 ‘DARPA’ 프로젝트 책임자이며, 세계적 항공사인 보잉사와 협력 연구를 진행 중인 조지아 공대 쿠마(Satish Kumar) 교수는 탄소섬유의 현재 연구추세에 대한 주제로 강연을 진행한다. 세계 최대 탄소 및 흑연 생산업체인 SGL 그룹의 기술책임자를 역임하고 자동차 분야의 복합소재의 권위자인 드레스덴 공대 예거(Hubert Jaeger) 교수는 섬유 강화복합재료의 중요성에 대한 주제로 강연을 펼친다. 또한 우주개발 연구의 세계적 선도기관인 NASA 소속의 박철 박사는 미래 항공 우주 차량 및 구조물을 위한 다기능 소재인 질화붕소 나노튜브(BNNT) 복합재료를 주제로 강연을 진행한다. 이번 행사를 주최한 KIST 전북분원 홍재민 분원장은 “이번 컨퍼런스는 세계적인 석학들이 한 자리에 모여 첨단 복합소재의 미래 비전을 제시한 의미있는 자리”라고 소감을 말했으며, “앞으로 KIST 전북분원이 복합소재 분야의 글로벌 키 플레이어로 도약하고, 국내 복합소재 산업 활성화 및 지역 산업발전에도 기여할 수 있기를 기대한다.”고 밝혔다. 전북 완주군에 있는 KIST 전북분원 복합소재기술연구소는 21세기를 주도할 첨단 소재산업을 연구·개발하는 복합소재전문연구소로 2008년 1월 설립되어 올해로 10주년을 맞았다. KIST 전북분원은 국내 최고 수준의 연구인력과 인프라를 갖추어 활발한 연구 성과들을 발표하고 있으며, 첨단 소재산업의 중심으로 떠오르고 있다. 향후 복합소재 분야 글로벌 리더로 도약하기 위한 기반을 구축하여, 국내외 기술인재와 중소기업 육성 등 지역 산업발전과 연계한 전략적인 방안을 모색 중이다. <그림설명>
- -1
- 작성자의료로봇연구단 강성철 박사팀
- 작성일2018.10.25
- 조회수12760
-
-2
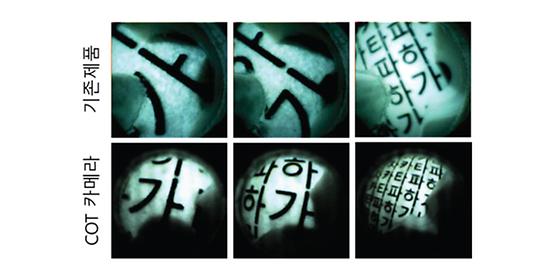
사람이 지닌 촉감의 착각(tactile illusion) 현상을 이용한 스마트폰용 2차원 촉감 제시 기술 개발
- 인간의 정신물리학적 촉-착각 현상을 이용하여 2차원적 촉감 구현 성능 높인 기술 - 손에 쥐게 되면 촉각으로 다양한 정보 느껴, 스마트폰 등 모바일기기 분야 활용 기대 촉감 제시(Tactile display) 기술*은 휴대폰, 컴퓨터, 의료, 재활 분야에서 지속적으로 연구되어왔으며, 그 적용 분야를 활발히 넓혀가고 있는 분야이다. 이 기술과 밀접한 관련이 있는 구동장치, 센서 등의 지속적인 발전으로 인해 소형화, 경량화가 이뤄지고 이를 이용한 다양한 자극 생성 장치들이 개발되고 있다. 최근 국내 연구진이 ‘촉감 착각 현상’(tactile illusion)을 응용하여, 스마트폰과 결합하여 사용 가능한 촉감 제시 기술을 개발하여 스마트폰, 의료재활, 컴퓨터 산업 등 다양한 분야에서의 활용 가능성을 선보이고 있어 주목을 끌고 있다. *촉감 제시(tactile display) 기술 : 사용자에게 힘, 진동, 패턴 등을 이용하여 가상의 촉감을 느끼게 하는 기술 한국과학기술연구원(KIST, 원장 이병권) 의료로봇연구단의 강성철 박사팀은 한국생산기술연구원(KITECH, 원장 이성일) 로봇연구그룹 양기훈 수석연구원과의 공동연구를 통하여, 인간의 촉감이 가지고 있는 착각 현상을 이용하여, 비교적 적은 수의 구동장치(actuator, 액추에이터)만으로 위치나 방향 정보를 효과적으로 생성하여 2차원적인 촉감 정보 전달이 가능한 기술을 최초로 개발하였다. 다수의 액추에이터를 사용하여 촉각 장치를 만드는 기술은 현재 선진국에서도 활발히 연구되고 있으나, 기본적으로 장치를 소형화하기 어려우며 구동장치 간 동작의 간섭을 효과적으로 제어하기가 어려웠다. 연구진은 12개의 선형 진동모터로 된 구동장치 간의 간섭을 최소화 하며, 손바닥 면에 촉감 디스플레이가 가능한 스마트폰용 햅틱 패드를 설계하였다. 이번 연구의 핵심 아이디어는 사람의 정신물리학적 인지 특성의 하나로서, 사람의 손바닥이 갖는 촉감 해상도의 한계로 인해 나타나는 촉-착각 현상(haptic illusion)을 응용하여, 적은 수의 구동기로 인접하는 구동기간의 자극의 세기와 타이밍을 조절함으로써 고해상도의 촉감 움직임과 방향성을 제시하는 기술이다. 이러한 기술로 만들어진 촉각 패드는 스마트폰과 결합하여 다양한 촉각 정보를 전달할 수 있는 정보전달 기기로 활용이 가능하며 활용분야가 넓다는 장점이 있다. 연구진은 개발된 촉각 패드가 시각장애인 및 일반인들에게 네비게이션으로 활용될 수 있으며, 게임 등과 연동하여 정보 전달이나 음악과 연동한 촉각 자극 전달도 가능함을 보였다. 향후 이 기술은 스마트폰 뿐 아니라 다양한 스마트 워치 등 다양한 모바일 기기의 촉감기반 사용자 인터페이스로까지 확장시킬 수 있다는 점에서 학계의 큰 관심을 받고 있다. KIST 강성철 박사는 “이번 연구를 통해 촉-착각(haptic illusion), 열-착각(thermal illusion) 등 사람이 가지고 있는 다양한 정신물리학적 착각 현상을 활용하면, 보다 효과적이고 경제적인 촉감 디스플레이 기술이 가능할 것이다. 이러한 현상을 공학적으로 이용하면, 원거리에 있는 상대방의 촉감과 체온을 느낄 수 있는 보다 인간적인 ”휴먼-터치 인터페이스“가 가능할 것으로 기대하고 있다.”고 밝혔다. KIST는 금년 3월 ‘의료로봇연구단’(단장 강성철)을 신설하여 바이오, AI(인공지능), 로봇 기술을 융합한 의료 및 헬스케어 로봇 연구를 추진하여 고령화 사회를 대비한 인간의 건강과 삶의 질을 높이는 연구를 진행 중이다. 또한 본 연구는 인간의 인지·신체·시공간적 능력을 증강시키는 ‘휴먼+’ 기술을 지향하는 연구로서 과학기술정보통신부(장관 유영민) 지원으로 KIST 기관고유사업으로 수행되었으며, 산업정보학분야 국제학술지인 ‘산업정보학 저널(IEEE Transaction on Industrial Informatics, IF : 5.43, JCR 상위 : 1.06 %)’ 최신호에 게재되었다. * (논문명) Development of Vibrotactile Pedestal with Multiple Actuators and Application of Haptic Illusions for Information Delivery - (제1저자) 한국생산기술연구원 양기훈 수석연구원 - (공저자) 한국과학기술연구원 이우섭 선임연구원 - (교신저자) 한국과학기술연구원 강성철 책임연구원 <그림설명> [그림 1] 진동 촉각 자극의 활용 예시 개념도 [그림 2] 촉감 제시 패드의 설계도 [그림 3] 햅틱 촉각 패드의 개발 사진
- -3
- 작성자의료로봇연구단의 강성철 박사팀
- 작성일2018.10.11
- 조회수11637
![[그림 2] 환자들을 대상으로 비대면 배송을 수행 중인 딜리버디-H](/app/board/attach/image/thumb_13828_1714012854000.do)