
코로나19 대응
로봇/ICT융합방역체계
연구책임자 : 방역로봇사업단 오상록 책임연구원

기술개발사유

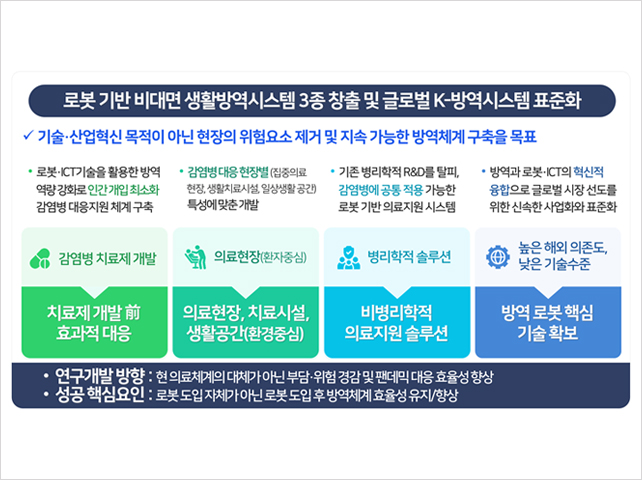
연구목표
로봇·ICT를 활용·융합하여 現의료체계의 부담·위험을 경감하면서 효율적 팬데믹 대응 및 지속적 유지·운영 가능한 로봇 기반 비대면 新방역체계 구축 및 글로벌 K-방역시스템 표준화

기술소개
감염병 대응 현장별(집중의료현장, 생활치료시설, 일상생활 공간) 로봇 시스템의 개발 및 현장실증 추진
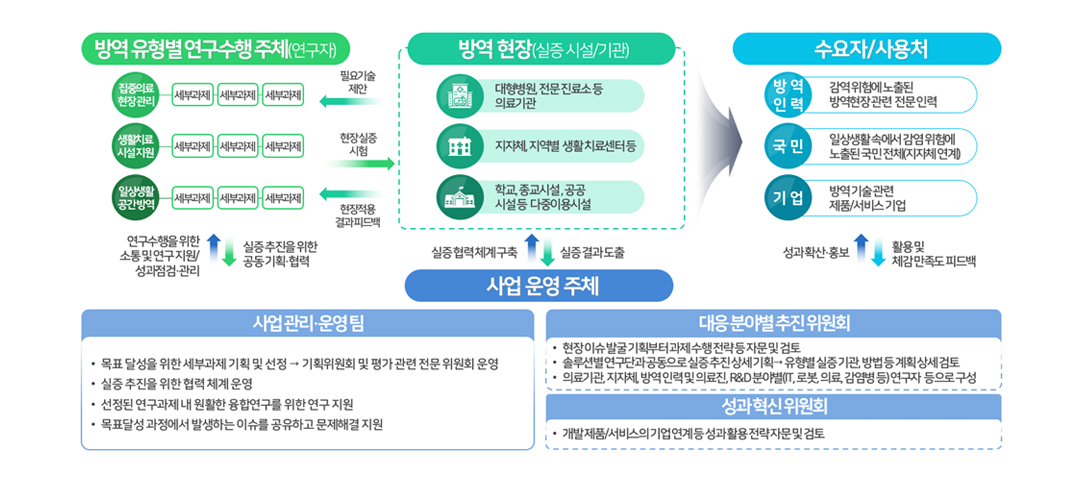
<방역로봇사업단 역할 체계 구성>
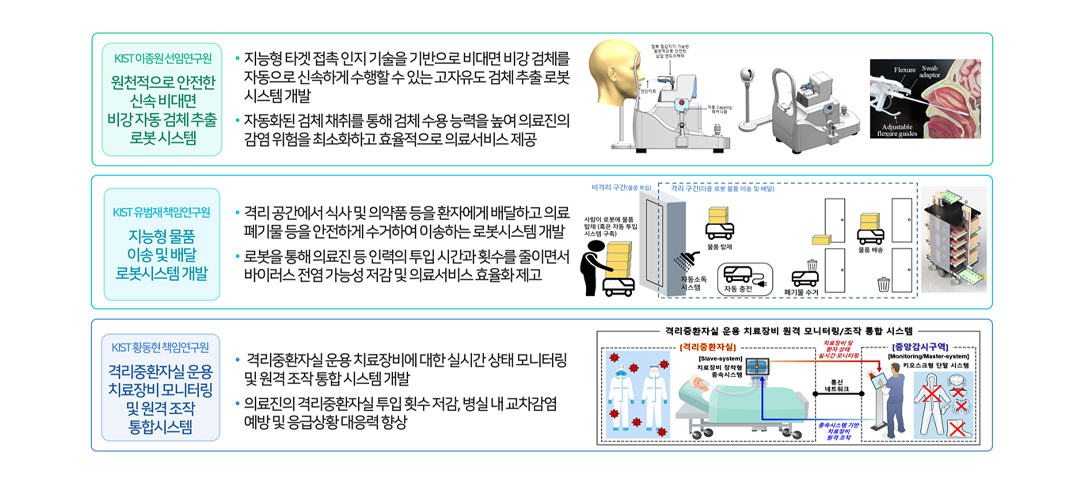
<방역로봇사업단 KIST 연구진 연구개발 내용>
<2021 대한민국 과학기술대전 - 방역로봇사업단 연구성과 인터뷰>
* 본 연구는 과학기술정보통신부 혁신도전 프로젝트 시범사업으로 지원되었습니다.